Demonstration of distance_model
Bayesian kinematic distance calculator.
Trey Wenger, 2025
[1]:
import pickle
import numpy as np
from scipy.stats import multivariate_normal
import pymc as pm
import arviz as az
import matplotlib.pyplot as plt
from physiokinematic.distance_model import distance_model
[2]:
# Load Reid et al. (2019) rotation curve parameters
with open("../../../data/reid19_params.pkl", "rb") as f:
reid19_params = pickle.load(f)
print(reid19_params.keys())
samples = reid19_params['full'].resample(1_000)
# R0, Usun, Vsun, Wsun, a2, a3
samples = samples[np.array([0,1,2,3,6,7]), :]
reid19_fit = multivariate_normal.fit(samples.T)
dict_keys(['R0', 'Usun', 'Vsun', 'Wsun', 'Upec', 'Vpec', 'a2', 'a3', 'full'])
/tmp/ipykernel_331187/3720529096.py:3: DeprecationWarning: Please import `gaussian_kde` from the `scipy.stats` namespace; the `scipy.stats.kde` namespace is deprecated and will be removed in SciPy 2.0.0.
reid19_params = pickle.load(f)
[3]:
model = distance_model(
32.5, # Galactic longitude (degrees)
1.25, # Galactic latitude (degrees)
42.0, # LSR velocity (km/s)
0.5, # LSR velocity uncertainty (km/s)
reid19_fit[0], # Prior mean on rotation curve parameters
reid19_fit[1], # Prior covariance on rotation curve parameters
prior_Rgal = 5.0, # Prior width on Galactocentric radius (kpc)
prior_kdar = [0.5, 0.5], # Prior shape for kinematic distance ambiguity resolution
vlsr_sigma = 10.0, # Assumed LSR velocity systematic uncertainty (km/s)
)
[4]:
model
[4]:
$$
\begin{array}{rcl}
\text{rotcurve} &\sim & \operatorname{MultivariateNormal}(f(),~\text{<constant>})\\\text{Rgal_norm} &\sim & \operatorname{Gamma}(0.5,~f())\\\text{kdar_w} &\sim & \operatorname{Categorical}(\text{<constant>})\\\text{Rgal} &\sim & \operatorname{Deterministic}(f(\text{Rgal_norm},~\text{rotcurve}))\\\text{distance} &\sim & \operatorname{Deterministic}(f(\text{rotcurve},~\text{Rgal_norm}))\\\text{vlsr_obs} &\sim & \operatorname{Normal}(f(\text{rotcurve},~\text{Rgal_norm}),~f())
\end{array}
$$
[5]:
# sample prior predictive
with model:
prior = pm.sample_prior_predictive(1_000)
Sampling: [Rgal_norm, kdar_w, rotcurve, vlsr_obs]
[6]:
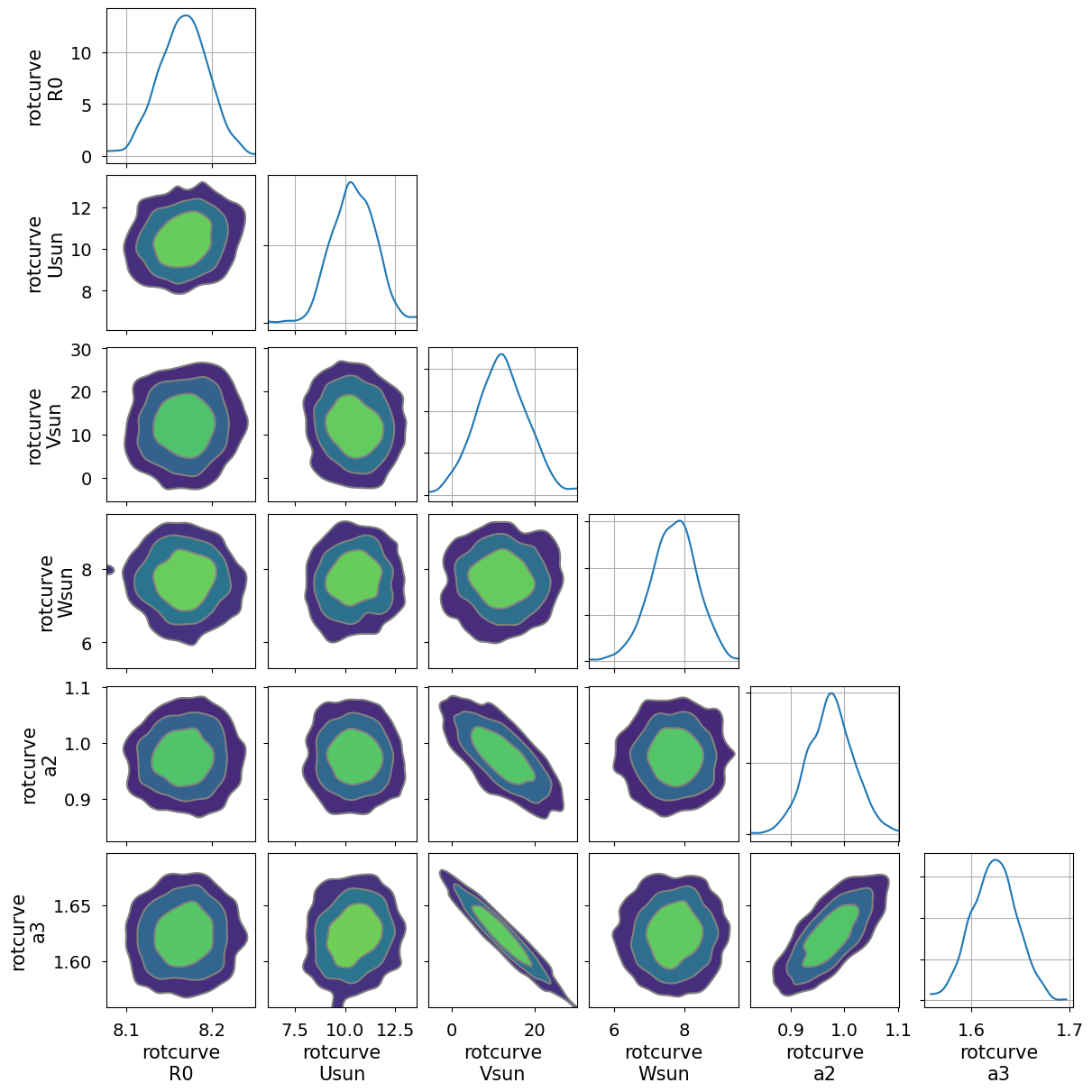
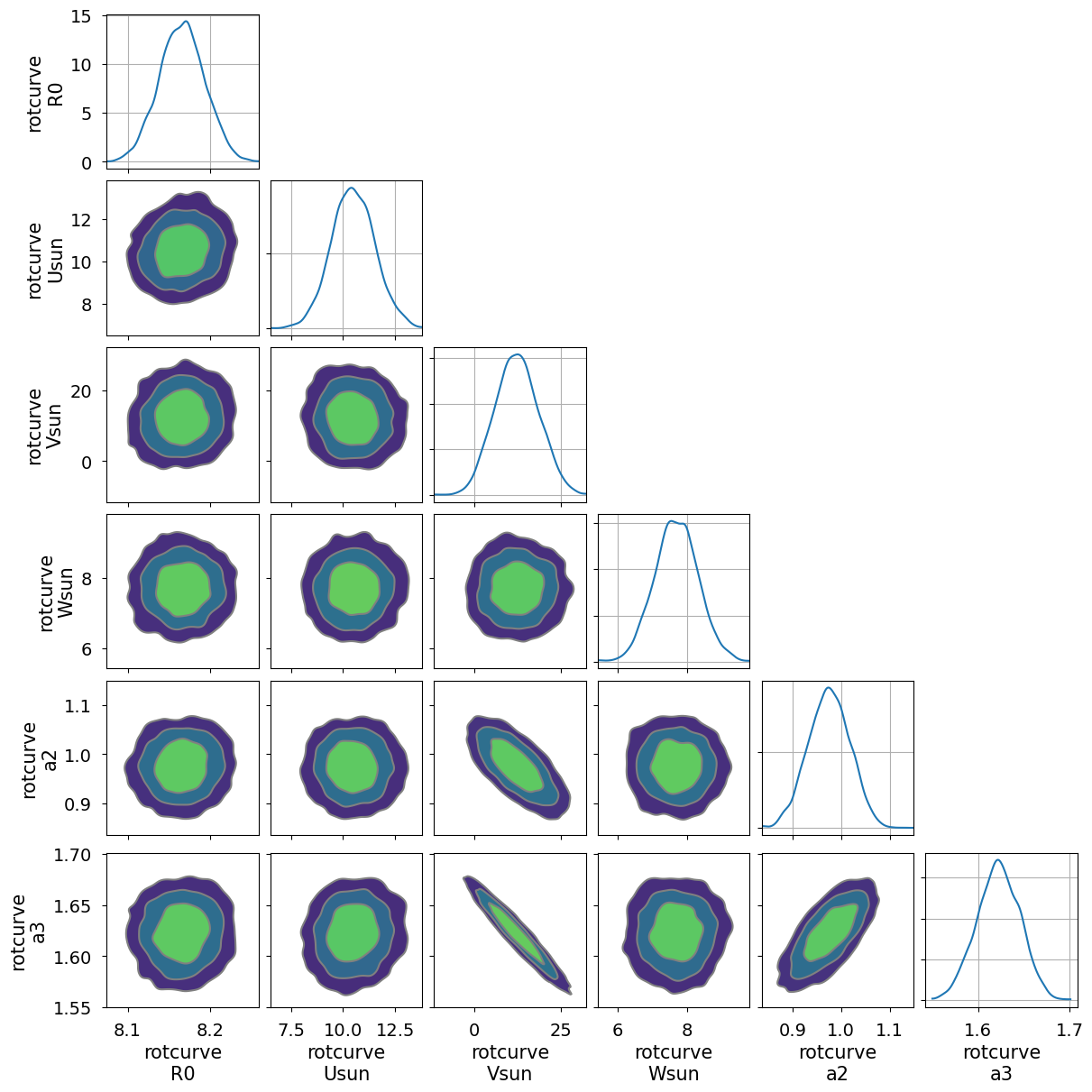
# plot prior samples
_ = pm.plot_pair(prior.prior["rotcurve"], marginals=True, figsize=(12, 12), kind='kde', backend_kwargs={"layout": "constrained"})
[7]:
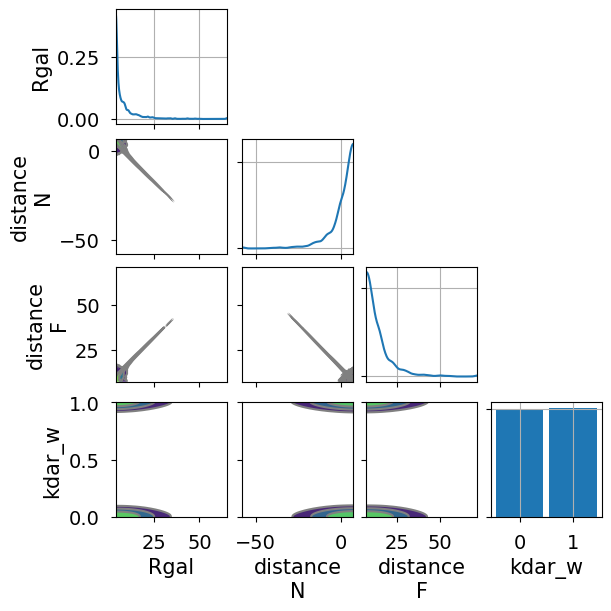
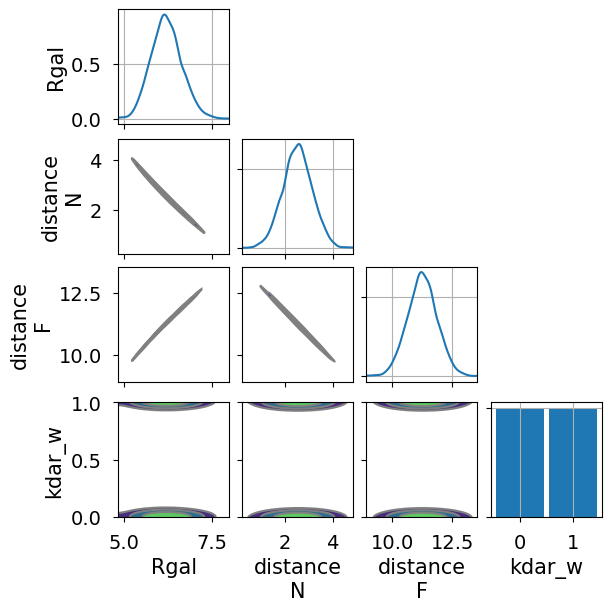
# plot prior samples
_ = pm.plot_pair(prior.prior, marginals=True, figsize=(6, 6), kind='kde', backend_kwargs={"layout": "constrained"}, var_names=["Rgal", "distance", "kdar_w"])
[8]:
with model:
trace = pm.sample()
Multiprocess sampling (4 chains in 4 jobs)
CompoundStep
>NUTS: [rotcurve, Rgal_norm]
>BinaryGibbsMetropolis: [kdar_w]
100.00% [8000/8000 00:04<00:00 Sampling 4 chains, 0 divergences]
Sampling 4 chains for 1_000 tune and 1_000 draw iterations (4_000 + 4_000 draws total) took 5 seconds.
[9]:
az.summary(trace, hdi_prob=0.68, var_names=["rotcurve", "Rgal", "distance", "kdar_w"])
[9]:
| mean | sd | hdi_16% | hdi_84% | mcse_mean | mcse_sd | ess_bulk | ess_tail | r_hat | |
|---|---|---|---|---|---|---|---|---|---|
| rotcurve[R0] | 8.166 | 0.027 | 8.138 | 8.192 | 0.000 | 0.000 | 4150.0 | 2853.0 | 1.0 |
| rotcurve[Usun] | 10.484 | 1.039 | 9.465 | 11.480 | 0.016 | 0.017 | 4151.0 | 2842.0 | 1.0 |
| rotcurve[Vsun] | 12.269 | 6.245 | 5.464 | 17.982 | 0.130 | 0.096 | 2297.0 | 2485.0 | 1.0 |
| rotcurve[Wsun] | 7.700 | 0.627 | 7.076 | 8.315 | 0.010 | 0.011 | 3740.0 | 2217.0 | 1.0 |
| rotcurve[a2] | 0.975 | 0.043 | 0.929 | 1.015 | 0.001 | 0.001 | 2724.0 | 2816.0 | 1.0 |
| rotcurve[a3] | 1.622 | 0.023 | 1.600 | 1.647 | 0.000 | 0.000 | 2243.0 | 2403.0 | 1.0 |
| Rgal | 6.203 | 0.438 | 5.750 | 6.606 | 0.008 | 0.007 | 3046.0 | 2192.0 | 1.0 |
| distance[N] | 2.526 | 0.627 | 1.947 | 3.167 | 0.011 | 0.012 | 3050.0 | 2173.0 | 1.0 |
| distance[F] | 11.252 | 0.626 | 10.606 | 11.829 | 0.011 | 0.012 | 3047.0 | 2192.0 | 1.0 |
| kdar_w | 0.502 | 0.500 | 0.000 | 1.000 | 0.004 | 0.000 | 14408.0 | 4000.0 | 1.0 |
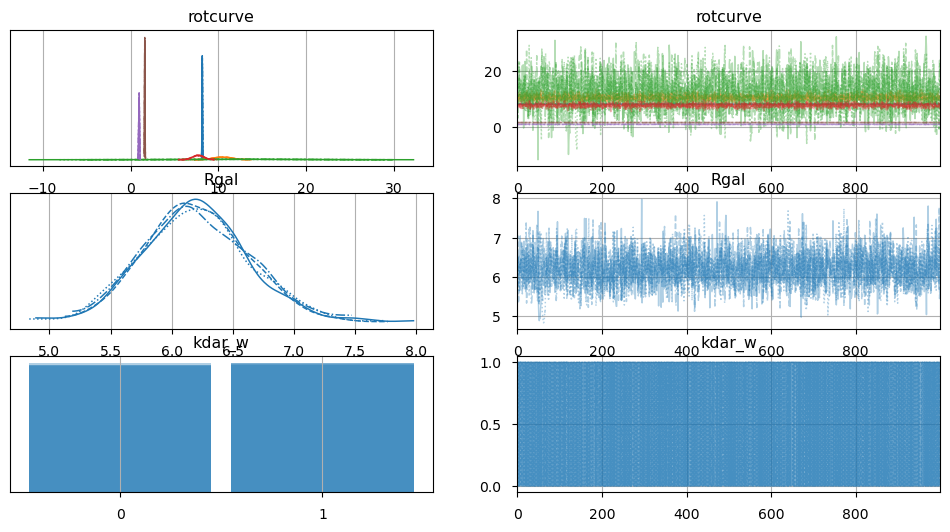
[10]:
_ = pm.plot_trace(trace.posterior, var_names=["rotcurve", "Rgal", "kdar_w"])
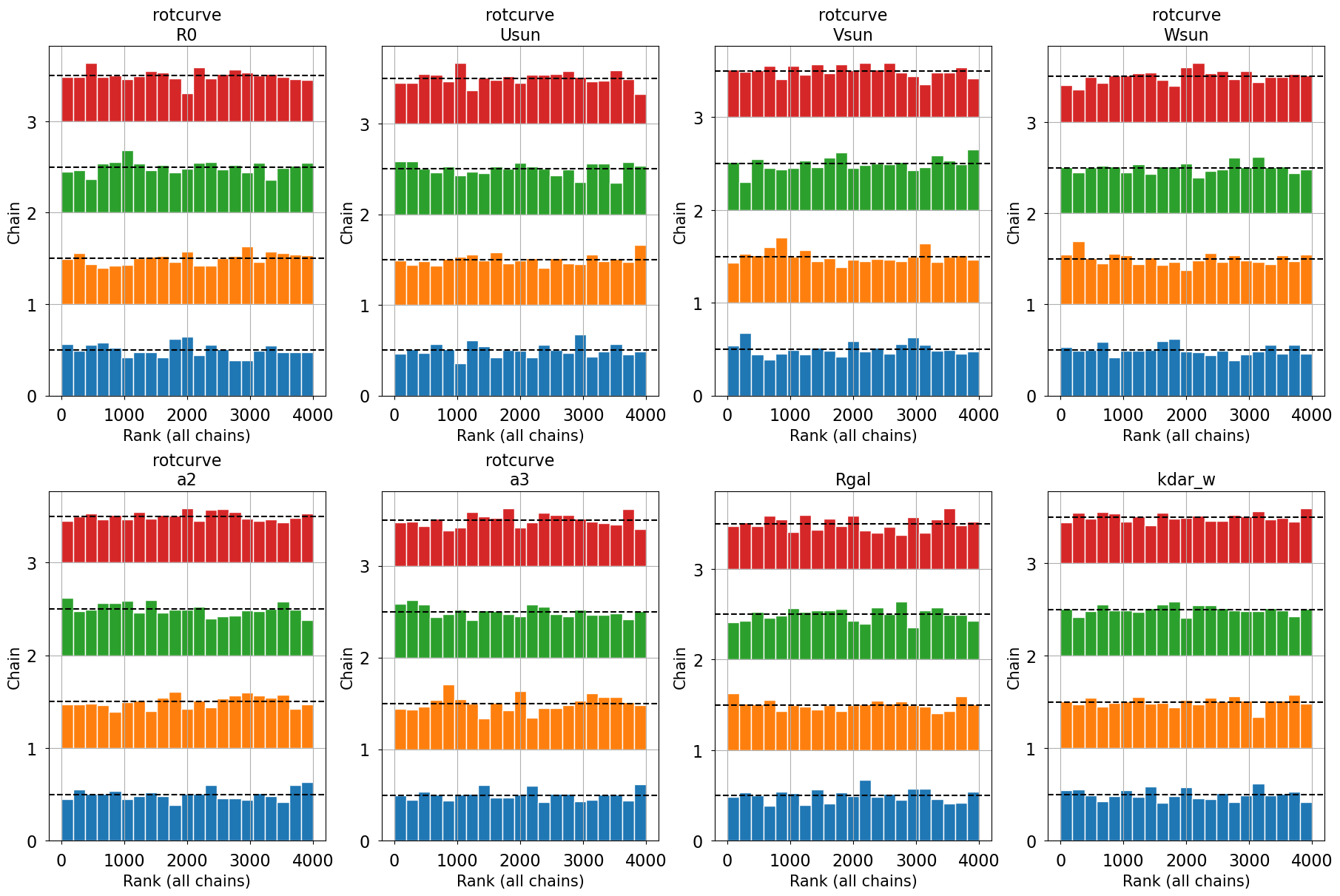
[11]:
_ = pm.plot_rank(trace.posterior, var_names=["rotcurve", "Rgal", "kdar_w"], figsize=(18, 12), backend_kwargs={"layout": "constrained"})
[12]:
# plot posterior samples
_ = pm.plot_pair(trace.posterior["rotcurve"], marginals=True, figsize=(12, 12), kind='kde', backend_kwargs={"layout": "constrained"})
[13]:
# plot posterior samples
_ = pm.plot_pair(trace.posterior, marginals=True, figsize=(6, 6), kind='kde', backend_kwargs={"layout": "constrained"}, var_names=["Rgal", "distance", "kdar_w"])
[14]:
# sample posterior predictive
with model:
posterior = pm.sample_posterior_predictive(trace.sel(draw=slice(None, None, 1)))
Sampling: [vlsr_obs]
100.00% [4000/4000 00:00<00:00]
[15]:
# drop samples with distance <= 0.0
bad_distance = trace.posterior["distance"] <= 0.0
result = {}
# Hyperparameters & distance-independent parameters
params = ["Rgal"]
for param in params:
if param not in trace.posterior:
continue
post = trace.posterior[param].data.flatten()
result[f"{param}_mean"] = np.mean(post)
result[f"{param}_std"] = np.std(post)
result[f"{param}_median"] = np.median(post)
hdi = az.hdi(post, hdi_prob=0.90)
result[f"{param}_hdi5"] = hdi[0]
result[f"{param}_hdi95"] = hdi[1]
# Distance-dependent parameters
params = [
"distance",
]
for param in params:
posterior_N = trace.posterior[param].sel(kdar="N").data[
(trace.posterior["kdar_w"] == 0) * (~bad_distance.sel(kdar="N"))
]
posterior_F = trace.posterior[param].sel(kdar="F").data[
(trace.posterior["kdar_w"] == 1) * (~bad_distance.sel(kdar="F"))
]
posterior_T = np.concatenate([posterior_N, posterior_F])
for kdar, post in zip(["N", "F", "T"], [posterior_N, posterior_F, posterior_T]):
if len(post) < 5:
continue
result[f"{param}_{kdar}_mean"] = np.mean(post)
result[f"{param}_{kdar}_std"] = np.std(post)
result[f"{param}_{kdar}_median"] = np.median(post)
hdi = az.hdi(post, hdi_prob=0.90)
result[f"{param}_{kdar}_hdi5"] = hdi[0]
result[f"{param}_{kdar}_hdi95"] = hdi[1]
result[f"{param}_samples"] = posterior_T
# KDAR weight
result["kdar_w"] = len(posterior_F)/len(posterior_T)
# Observed parameters
params = [
"vlsr_obs",
]
for param in params:
post = posterior.posterior_predictive[param].data.flatten()
result[f"{param}_mean"] = np.mean(post)
result[f"{param}_std"] = np.std(post)
result[f"{param}_median"] = np.median(post)
hdi = az.hdi(post, hdi_prob=0.90)
result[f"{param}_hdi5"] = hdi[0]
result[f"{param}_hdi95"] = hdi[1]
result[f"{param}_samples"] = post
[16]:
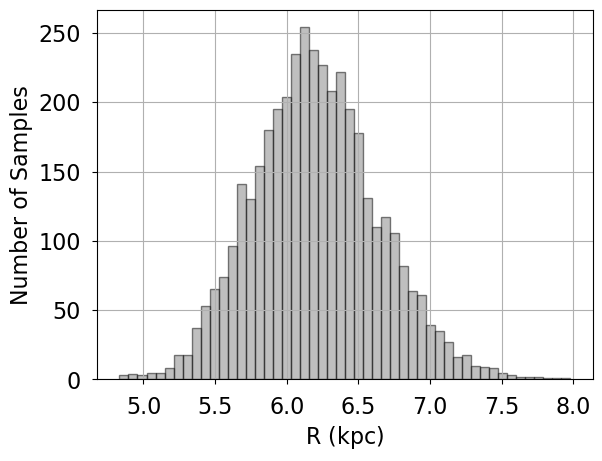
fig, ax = plt.subplots()
ax.hist(trace.posterior["Rgal"].data.flatten(), bins=50, color="gray", edgecolor="k", alpha=0.5)
ax.set_ylabel("Number of Samples")
ax.set_xlabel("$R$ (kpc)")
[16]:
Text(0.5, 0, '$R$ (kpc)')
[17]:
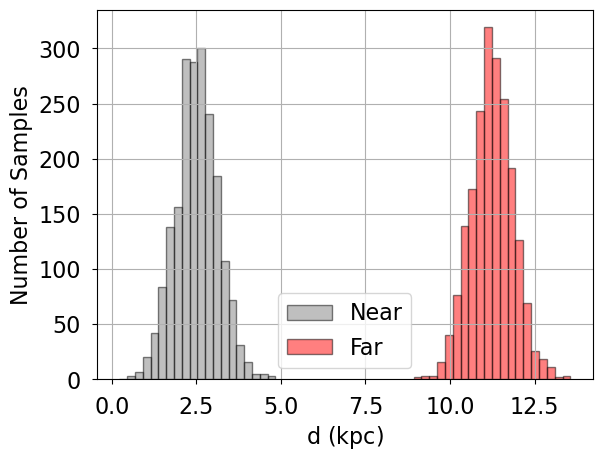
fig, ax = plt.subplots()
bins=20
ax.hist(trace.posterior["distance"].sel(kdar='N').data.flatten(), weights=(1-trace.posterior["kdar_w"].data.flatten()), bins=bins, color="gray", edgecolor="k", alpha=0.5, label="Near")
ax.hist(trace.posterior["distance"].sel(kdar='F').data.flatten(), weights=trace.posterior["kdar_w"].data.flatten(), bins=bins, color="red", edgecolor="k", alpha=0.5, label="Far")
ax.set_ylabel("Number of Samples")
ax.set_xlabel("$d$ (kpc)")
ax.legend(loc="best")
[17]:
<matplotlib.legend.Legend at 0x7ca8b393cf20>
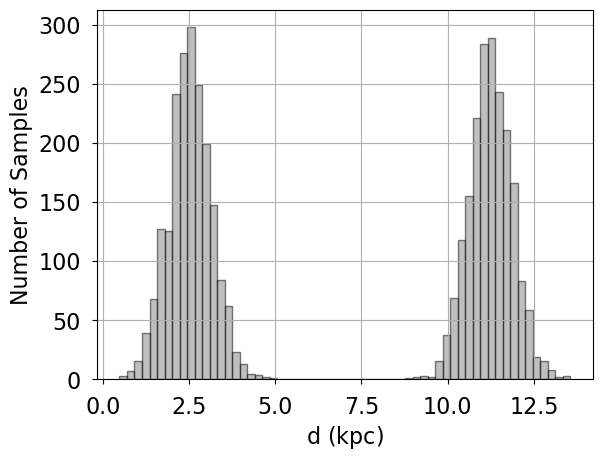
[18]:
fig, ax = plt.subplots()
bins=60
ax.hist(result["distance_samples"], bins=bins, color="gray", edgecolor="k", alpha=0.5)
ax.set_ylabel("Number of Samples")
ax.set_xlabel("$d$ (kpc)")
[18]:
Text(0.5, 0, '$d$ (kpc)')
[19]:
print(result["kdar_w"])
0.502
[20]:
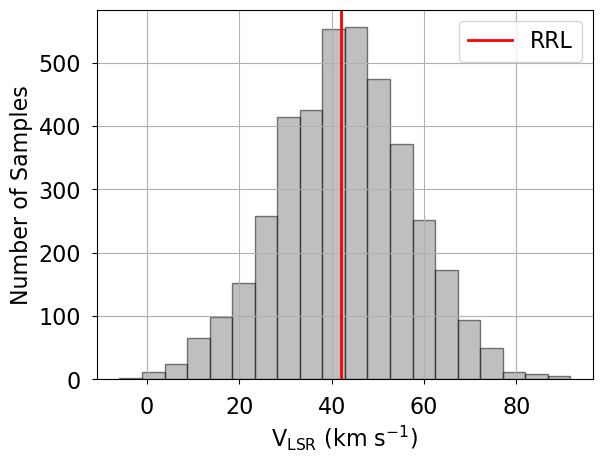
# plot posterior predictive samples
fig, ax = plt.subplots()
bins=20
ax.hist(result["vlsr_obs_samples"], bins=bins, color="gray", edgecolor="k", alpha=0.5)
ax.axvline(42.0, color="r", lw=2, label="RRL")
ax.set_ylabel("Number of Samples")
ax.set_xlabel(r"$V_{\rm LSR}$ (km s$^{-1}$)")
ax.legend(loc="best")
[20]:
<matplotlib.legend.Legend at 0x7ca8b3e46690>
[ ]: